Connected Vehicle Data Infrastructure
|
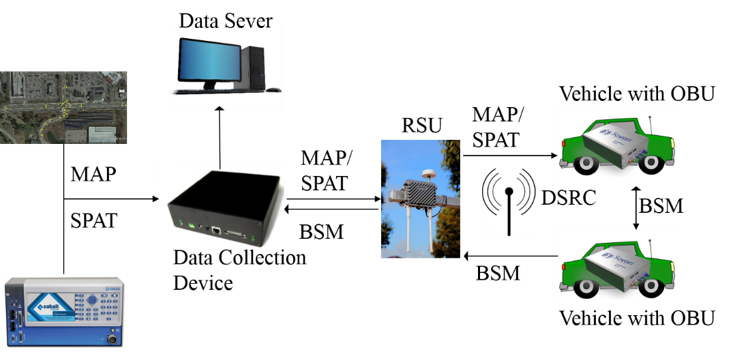
Connected Vehicles (CVs) generates a massive amount of data on a scale not seen in the traditional transportation systems, which provides a unique opportunity for developing a wide range of connected vehicle (CV) applications. We developed a CV data infrastructure that includes data collection, data processing, data management, data visualization, and performance index estimation. Potential CV applications including traffic state estimation, traffic control, and safety analysis, can be built on this connected data infrastructure. |
Next-Generation Traffic Control
|
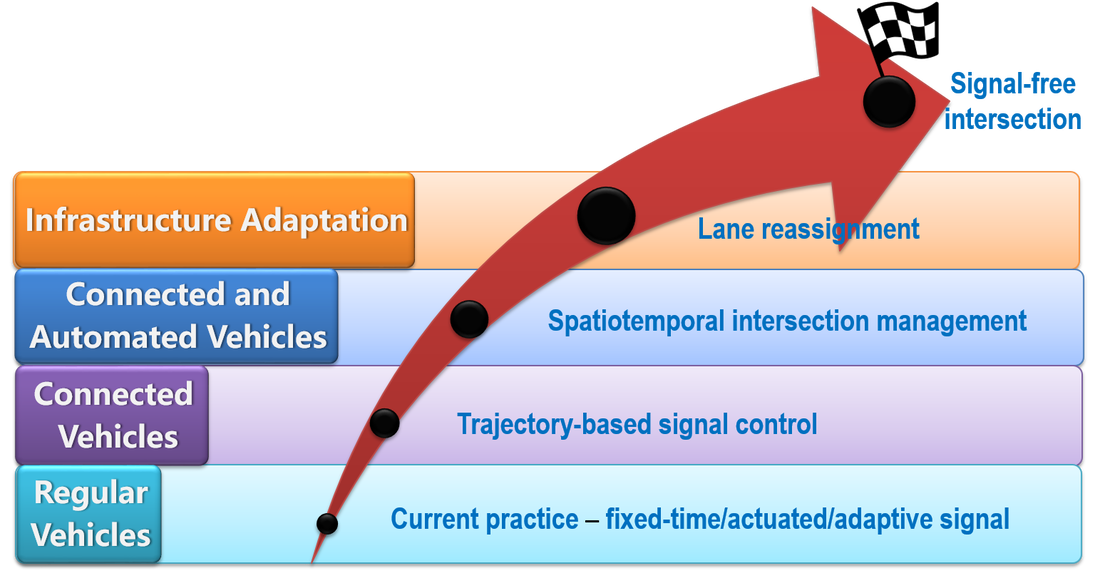
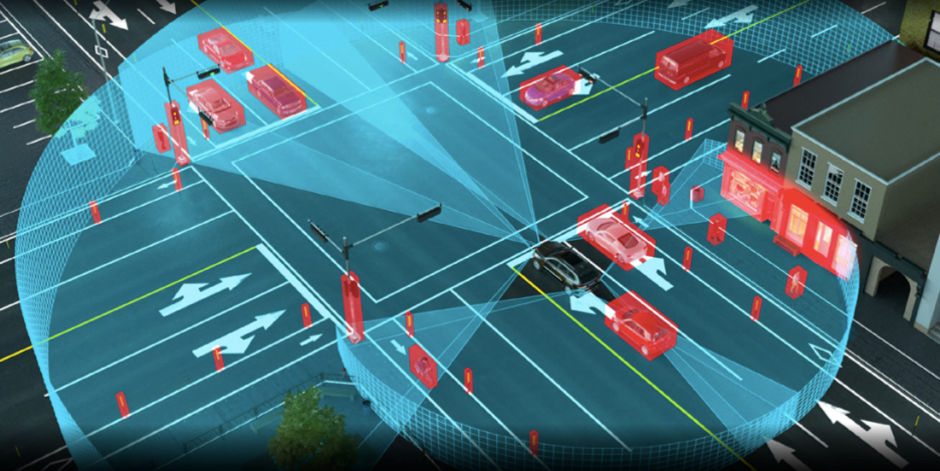
Traditional traffic control strategies rely on infrastructure-based sensors (e.g., loop detectors) to collect traffic data, which is fixed and discontinuous. With connected and automated vehicle (CAV) technology, vehicles and infrastructure can communicate with each other in real-time so that the traffic control system can estimate traffic conditions more accurately and utilize this new source of data to make “smarter” decisions. More importantly, CAV technology enables cooperative automation between vehicles and infrastructure, which extends the traffic control framework to two both spatial and temporal dimensions.
|
Cybersecurity of Transportation System

|
Existing transportation infrastructure are mostly deployed in private wired networks. With the development of wireless technology, vehicles and infrastructure devices will be connected through wireless communications, which might open a new door for cyber attackers. We investigate the cyber security problem of transportation infrastructure in a connected environment. We explore vulnerabilities of the current system, simulate cyber attacks, analyze consequences, and propose corresponding defense solutions to protect the system. |
Connected and Automated Vehicle Testing and Evaluation
|
Testing and evaluation are critical steps before the deployment of CAVs. It is essential to evaluate the “intelligence” of the CAV, similar to a driver’s license test, which indicates whether a CAV can operate safely and efficiently without human intervention. During the test, a CAV needs to interact with surrounding traffic flow as well as the roadway environment (i.e., testing scenarios), which makes it not only automotive engineering but a transportation engineering problem. Toward this end, we proposed a new evaluation framework, which combines an augmented reality testing environment and a testing scenario library generation (TSLG) platform, to assess the safety performance of CAVs accurately and efficiently.
|
